フライング ロボット チャレンジとは
UAV,UAS,ドローンなどの「飛行ロボット」を使う課題です.
サッカーや@ホーム,レスキューなどの「公式リーグ」ではなく,
実験的な立ち位置なので「チャレンジ」という名称が付いています.
2022年のジャパンオープンは、9月12日(月)~14日(水)に、会津大学で開催されます。
https://sites.google.com/view/flyingrobotchallenge/u-aizu-2022-sept

ロボカップ ジャパンオープン フライングロボットチャレンジ 2022年9月12日(月)~14日(水)
サッカーや@ホーム,レスキューなどの「公式リーグ」ではなく,
実験的な立ち位置なので「チャレンジ」という名称が付いています.
2022年のジャパンオープンは、9月12日(月)~14日(水)に、会津大学で開催されます。
https://sites.google.com/view/flyingrobotchallenge/u-aizu-2022-sept
2006年以降,イランチームが実験的にUAVリーグを行ってきました.
2018年には,
の2種類が実施されました.
GPSを使うアウトドアのコンペティションには,以下の様な高度なものがあります.
屋外であれば,RTKやみちびき等を用いることで,自己位置推定の手間が省けます.
したがって,日本ではアウトドアでのチャレンジは行いません.
非GPS・SLAM・AIなどの先端技術を駆使する屋内での「自律飛行ロボット」のチャレンジを行うことになりました.
ロボカップUAVのルールは、イランのMohammad准教授(Qazvin Islamic Azad University, Iran)が中心となって策定しています。
ロボカップアジアパシフィック2021・フライングロボットチャレンジでは、2020年度のルールで実施します。
くわしくは こちら
リモート参加で使用する機体は、Ryze Tech.のTelloです。
Tello SDKの使い方を知っていれば参加できます。
サンプルはこちらです。
https://github.com/hsgucci404/remotello
まずは競技フィールドのイメージです.下図の様に,複数の小部屋を持つ家屋をイメージしています.「@ホーム」や「レスキュー」リーグに近いですね.
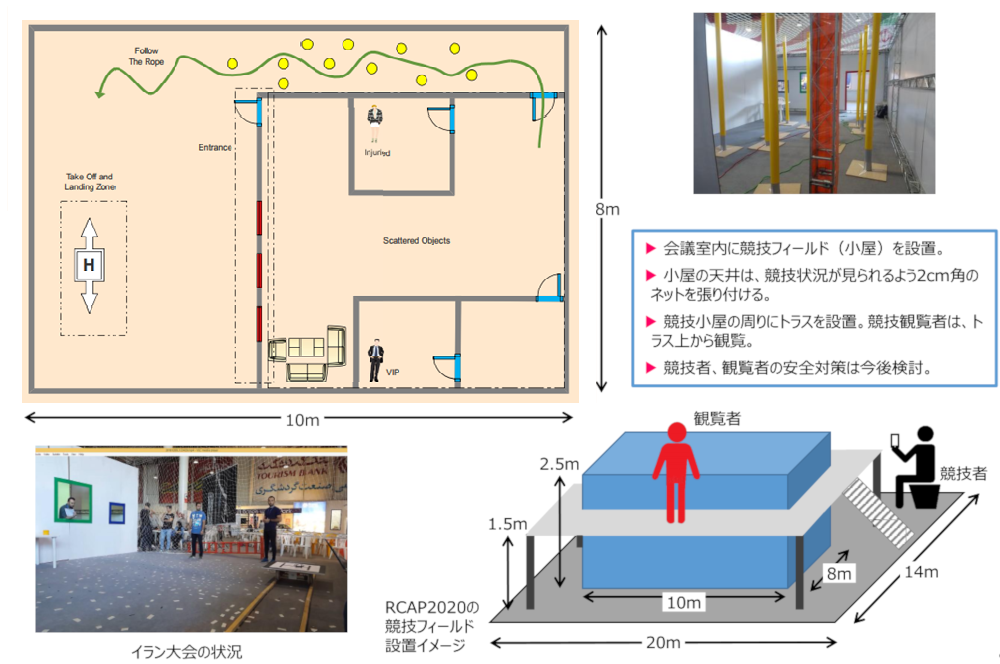
競技者は,できればフィールドの外から競技を行って欲しいです.しかし,無線LANの都合で,ドローンの至近距離でラップトップを使いたい場合もあると思われるので,1名だけはフィールド内に入ることが可能としています.
フィールドは,大きく分けて「離着陸ゾーン」「入り口」「部屋とターゲット」「ライントレース&障害物ゾーン」に分かれています.
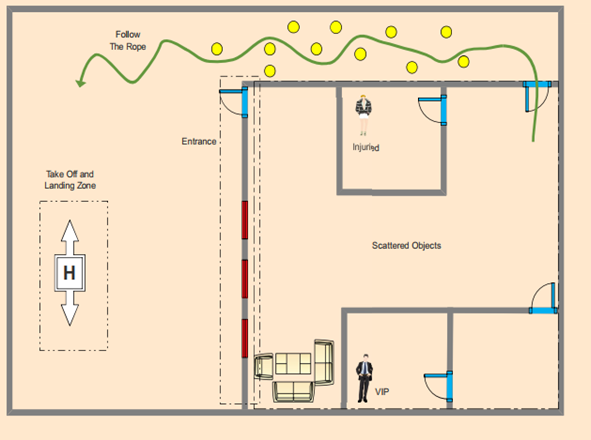
全体の流れとしては,以下の様になります.
1)離着陸ゾーンから発進
2)窓から侵入
3)小部屋の中には,負傷者やVIP, 目標物(ラップトップや消火器など)があるので,それを検出し位置を記憶
4)右上の出口から脱出し,ロープをライントレース.(障害物もあるので回避しながら)
5)離着陸ゾーンへ着陸
それぞれのポイントは,
1)および5)では,離着陸ゾーンは「並進運動するヘリポート」です.離陸位置を固定してしまうと,オドメトリだけでミッションをクリアすることが可能になってしまうので,原点を移動させています.そのため画像処理やレーザスキャナによるフィードバック処理が要求されます.ヘリポートは,ラジコンカーまたは移動ロボットを使って,一定速度で走る様になっています.
また,日本のロボコンにありがちな「精密な寸法図」は公開しません.レスキューミッションという設定なので「調査する建物の詳細な図面があらかじめ入手できる」という期待はすべきではないでしょう.
2)の家屋侵入では,窓が3つがあります.2018大会(下写真)では,ドアや窓の枠にカラーテープが貼ってありましたが,今回はありません.

窓枠の色の代わりに,窓の下に下図の様なカラーマーカーをつけます.
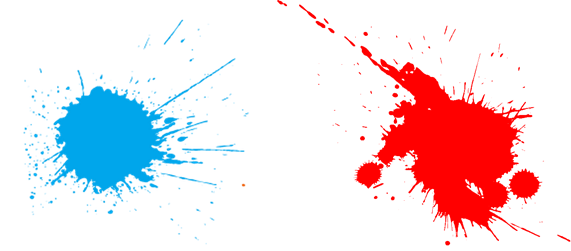
このマーカーは「ドローンが侵入する窓を,ペイントボール弾で指示した」という意味です.実際の災害現場で「レスキュー隊員が建物関係者から聞き取りをして,どの窓から侵入するかを決め,ペイントボールガンでマークを付けた」というストーリーになります.
窓の大きさは0.5×0.5mなので50cm四方です.ということは450サイズの機体は窓から侵入できない大きさということになります.(この点は,練習会などで要望が多ければ大きな窓へ変更する可能性もあります)
3)では,部屋のあちこちに要救助者やVIP,物資(ノートPC,救急箱,消火器)を模したオブジェクトが置いてあるので,どこにあったのかを記録します.
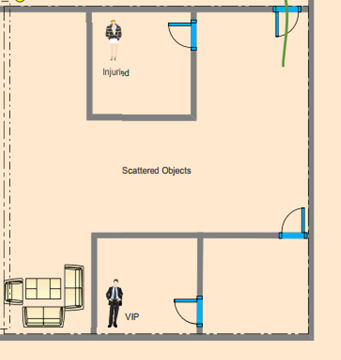
記録の方法は,各チームで設定してください.
というのは,総合的な技術の差が予想されるからです.マッピング技術のあるチームならば,発見したオブジェクトの位置座標を明確に示すことができると思います(これが最高の得点パターン).しかし,AI等を用いてオブジェクトを「検出した」だけでも得点は得られるので,記録データの保持の仕方は自由です.
4)では,地面に置かれた色付きロープをたどって,離着陸ゾーンへ帰ります.下写真ではトラロープで実験していますが,今回は単色の赤ロープになります.
また,ロープの近くには障害物が置かれます.「障害物を避けならがライントレース」をする必要があります.障害物には黄色がついています.


———————————————–
出場可能な機体
(1)市販機,(2)自作機のいずれでも参加が可能です.
本チャレンジで特に注意する点は「技適認証を守ること」になります.
市販機の条件は
①技適認証製品
②SDKなどの対応
③各国で調達できる
としています.
以下の様な機体が想定されます.
| メーカー | 商品 | ① | ② | ③ | 備考 |
| DJI | Telloシリーズ | ○ | ○ | ○ | |
| DJI | Mavic mini または mini2 | ○ | ? | ○ | MobileSDKで自律飛行できる? |
| Parrot | Bebop2 | ○ | ○ | ○ | 生産中止のため入手困難 |
| Parrot | ANAFI | ○ | ○ | ○ |
真下を見ることができるParrot製品が有利ですが,Bebop2は調達が困難,ANAFIは高額です.Mavic miniはカメラを下に向けることができますが,プログラムによる自律飛行の可能性は不明です.
ルールで後述しますが,FPVによる手動操作は「自律飛行ではない」ので評価対象になっていません.
上記の市販機以外でも,自律飛行が可能であれば出場は可能です.
また,当然ですが,技適認証のない機体での参加はご遠慮ください.
ラジコン送信機や画像伝送装置は技適認証製品であることを厳守してください.
また5.8 or 5.7GHzの装置を利用する場合,必要な資格を有する方が操作してください.
HD/フルHD/4K撮影可能な,いわゆる”マイクロドローン”での参加も可能です.
が, ルールで後述しますが FPVによる手動操作は評価対象ではありません.
最終スコアは,ミッションスコア(E),当該ミッションでの自律レベル(A),機体サイズ評価(S),ミッション連続性(I)によって,以下の様に計算されます.

1チームで複数台の機体を使用する場合,機体は色や番号などで区別してください.
複数の機体で同じミッションに挑戦し成功した場合,最高得点を採用します.
出場者のモチベーションのための倍率です.
機体をストップさせることなく,連続してミッションを成功させることができると評価が高くなる仕組みです.
| 1回のトライアルで成功したミッション数 | I |
| 1 | 1.0 |
| 2 | 1.1 |
| 3 | 1.2 |
| 4 | 1.3 |
| 5(最大) | 1.5 |
チームはそれぞれのミッションを,別々のプログラム,別々の機体,別々の担当者で挑戦する事ができます. ですが本来は全てのミッションを1台の機体で行うべきなので,続けて成功できると加点される,という仕組みです.
自律レベルは,機体をどの様に操作するかで決まる倍率です.
| 自律レベル | Au |
| 自律フライトコントロール 移動は自動だが,ミッション切り替えは手動 | 1 |
| 自律ターゲット検出 移動は手動だが,ターゲットの検出と処理は自動 | 1 |
| 完全自律ミッションコントロール 移動や認識,意思決定の全てが自動.オペレータは操作せず. | 2 |
| ARマーカーやQRコードなどで 環境に手を加える場合 | マーカ1個あたり 上記から-0.2 |
今回は,以下のレベルの区別はしません.
1)機体にRaspberry PiやJetson NanoなどのPCを搭載して完全自律化した機体
2)TelloやParrotの様に外部PCに映像を送って処理するリモートブレイン方式
2019年度ルールでは,FPV装置を使った手動操縦機体がAu=1,自律機体がAu=6,完全自律がAu=12の係数で参加可能でしたが,2020では手動操縦は評価対象になっていません.
各ミッションに成功したチーム数によって変動するポイントです.
以下の計算式でAを計算します.
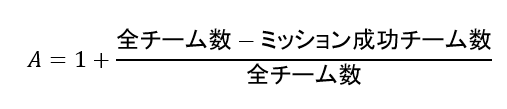
そのミッションをクリアできたチームが少なければ,2に近いポイントが得られます.
例えば,離陸は全チームがクリアできそうなので,ポイントは1になるでしょう.
1チームの持ち時間は20分です.セットアップの時間も含みます.
時間内であれば,何度もコースにチャレンジすることができます.
各ミッションのスコアEは以下の表になります.
| ミッション要素 | S |
| 離陸し,5秒間ホバリング維持 | 静止したヘリポートから 1点 動くヘリポートから 2点 |
| 建物へ侵入 | マーカーなし窓 2点 マーカーあり窓 4点 |
| 負傷者発見 | 人の発見 1名あたり+3点 地図上に図示 1名あたり+1点 |
| VIPの発見 | 人の発見 1名あたり+3点 地図上に図示 1名あたり+1点 |
| 物体の発見と位置特定 | 物体の発見 1個あたり+2点 地図上に図示 1名あたり+1点 |
| ロープのトレース | コースを1/3進む度に+3点 障害物に接触 1回あたり-0.5点 |
| 着陸 | ヘリポート以外 0点 静止したヘリポート 1点 動くヘリポート 3点 |
| 地図作成 | 地図の品質によって変動 1~15点 |
| タイム | 1位 3点 2位 2点 3位以降 1点 |
| チーム名 | eR@sers | Daido HashiLab 01 | Daido HashiLab 02 | UOA_Flight | Robot Rocker |
| 11月25日 | 109.48 | 15.0 | 0 | 1.4 | 0 |
| 11月26日 | 96.88 | 25.74 | 0 | 18.48 | 0 |
| 11月27日 | 112.56 | 34.32 | 0 | 13.6 | 0 |
| 11月28日 | 101.92 | 37.92 | 0 | 42.72 | 0 |
| 最高得点 | 112.56 | 37.92 | 0 | 42.72 | 0 |
個別スコアシート
全体スコアシート
競技者用リンク(定点カメラ)
全体会議で使います。
https://zoom.us/j/96091566237?pwd=aXhjUEVLbGxvT1ZYZS9DZ2x5RkwrQT09
機体追尾リンク(移動カメラ)
iPhoneで競技している機体を追いかけます。競技していないときの絵も垂れ流しです。
話しかけられても応答できません。
https://us06web.zoom.us/j/85849930709?pwd=d0IrVm1vN0xxSk9uMnc3RGUzT3kzdz09
23日テスト用
https://youtu.be/97Otq6L-DrA
24日テスト用
https://youtu.be/JFOuoByeE_c
25日
https://youtu.be/M0V9zE6mO3g
26日
https://youtu.be/Qx92Wy0v9PE